









Beschreibung
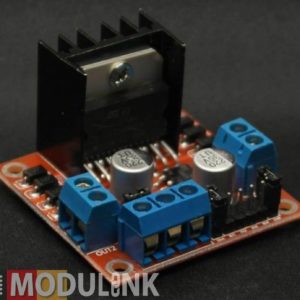
- Motor Leistungstreiber Shield mit L298P Treiber von ST. Zwei komplette Vollbrücken, bis zu 2 DC Motoren oder ein 2 Phasen Schrittmotor
- inklusive Freilaufdioden-Array für Induktionshandhabung von hochinduktiven Motoren
- Für Feedback ist ein Buzzer auf Port D4 angebunden
- Die Motorsteuerung ermöglicht das Messen des Motorstroms (A2 und A3)
- Anschluss von Servofeedbacks, falls man Servos verwenden möchte
- Versorgungsspannung: 4.8-24V
- Motorstrom: 3A max. für 100µs (nicht widerholend), 2.5A für t=10ms mit 80% PWM an, 2A bei DC (bei hohem Bedarf bitte kühlen)
- PWM Frequenz bis max. 40kHz. (typ. 25kHz) oder weniger, je nach Leistungsbudget
- Die Belegung der Pins finden Sie bitte in einer Tabelle weiter unten, die Funktionsblöcke bei den Bildern der Auktion
Leistungstreiber L298P Unterstützte Zahl Achsen bis zu 2 (DC), 1 Schrittmotor (2-phasen) Leistungsdaten 2A (4,8 bis 24V) Versorgungsspannung 4,8 bis 24V Logik/Ausgangsignal 5V Maße (Länge, Breite, Höhe) 70 mm x 53 mm x 25 mm (inkl. Stiftleisten) Gewicht ~35 g Stiftleiste & Raster 2,54mm Raster Stiftleisten – Steckbrett kompatibel
Pinning am Modul (zu Arduino Uno und Mega2560)
| UNO / MEGA 2560 | Keyes_L298P | Ein/Ausgang | Beschreibung |
|---|---|---|---|
| A2 | Motor_A_IR_Sensor | INPUT analog | Motor-Strom Motor A |
| A3 | Motor_B_IR_Sensor | INPUT analog | Motor-Strom Motor B |
| D13 | Motor A DIR | OUTPUT | Motor A Drehrichtung |
| D12 | Motor B DIR | OUTPUT | Motor B Drehrichtung |
| D11 | Motor A PWM | OUTPUT | Motor A Geschwindigkeit |
| D10 | Motor B PWM | OUTPUT | Motor B Geschwindigkeit |
| D3 | GPIO | INPUT/OUTPUT | genereller EIN/AUSgang |
| D4 | BUZZER | OUTPUT | Buzzer Ausgang, Rückmeldung Nutzer |
| D6 | SERVO_TILT | INPUT | Servo Feedback |
| D7 | TRIGGER_PIN (T) | INPUT/OUTPUT | Eingang/Ausgang Auslösen von bspw. Aktionen |
| D8 | ECHO_PIN (R) | INPUT/OUTPUT | Eingang/Ausgang Auslösen von bspw. Aktionen |
| D9 | SERVO | INPUT/OUTPUT | D9 auf Servo Stiftleiste (weiss) |




What others are saying
There are no contributions yet.